Adding springs to legged robots can cut their energy use, but the benefit depends on both how the spring is designed and how the controller uses it, so the two must be designed together. This joint co-design is difficult because foot contact and spring engagement make the problem non-smooth, which blocks standard gradient-based optimization.
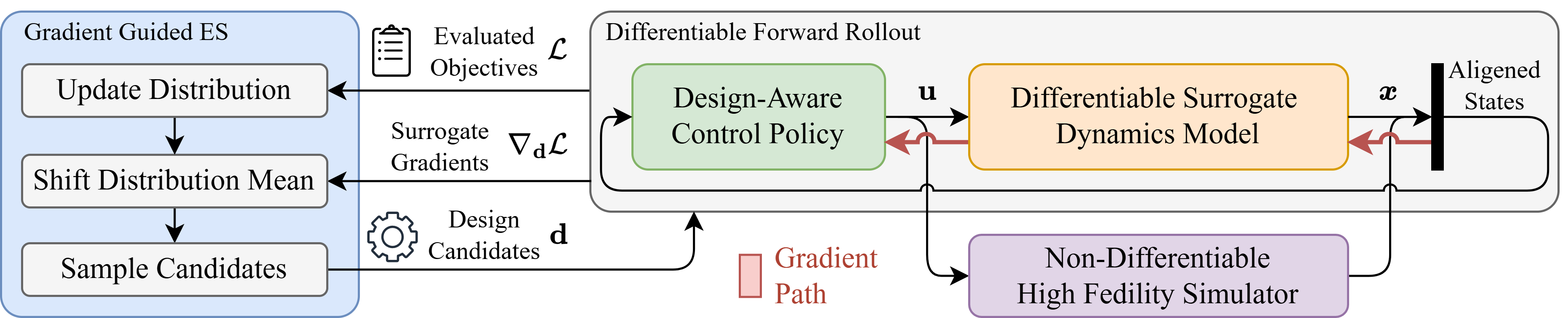
We present SurGE, a framework that combines an evolutionary search with an approximate gradient. The gradient comes from a simplified, differentiable model of the robot paired with a single control policy that adapts to any design. It steers the search toward promising designs early on, while every candidate is still evaluated in a high-fidelity simulator to keep the search grounded.
On a hopping robot with a parallel spring, SurGE matches or improves the best design found by standard evolutionary search while converging far more reliably, with about 6 times less variation across random seeds. On hardware, it refines a hand-tuned design by 37.65%, and the gains seen in simulation transfer consistently to the real robot.
SurGE jointly optimizes a robot's physical design and its controller. The key idea is to guide a population-based evolutionary search with gradient information, even when the true dynamics are not differentiable. A lightweight differentiable model of the robot, paired with a single control policy that adapts to any design, produces an approximate (surrogate) gradient that points the search toward better designs. Because this gradient is only approximate, every candidate is still scored in a high-fidelity simulator, and the gradient's influence is gradually faded out so the search settles cleanly on a final design.
We test SurGE on MUPS v2, a one-legged hopping robot whose parallel spring can be physically tuned through four design parameters (spring stiffness, engagement length, and two linkage lengths). The goal is to find a spring-and-controller combination that hops at a target height and speed while using as little energy as possible. SurGE refines a hand-tuned starting design into a more efficient one, and the improvement holds up on the real robot: the hopping cost drops 37.65% on hardware, closely matching the trend predicted in simulation.
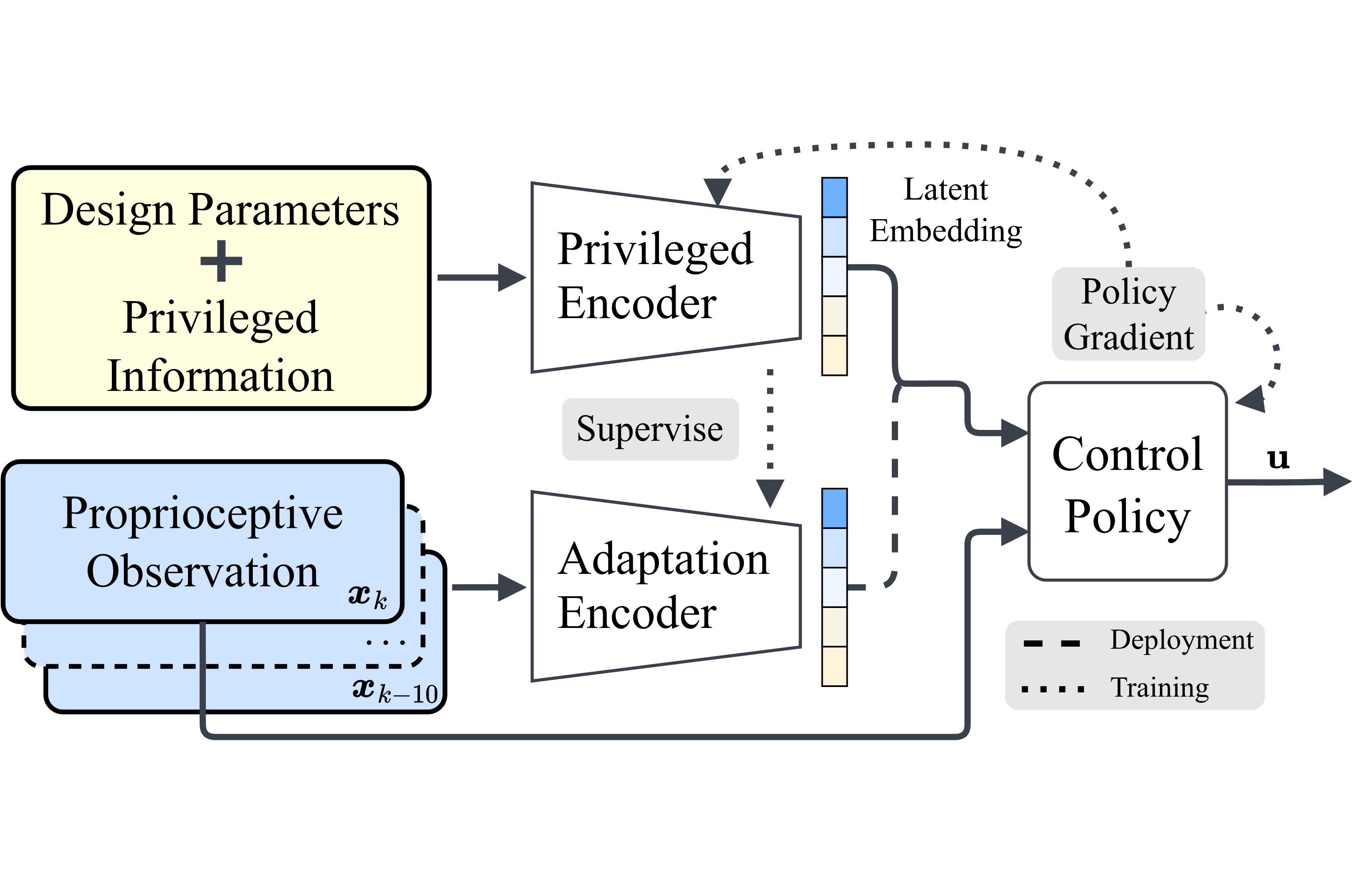
Architecture of the design-aware policy
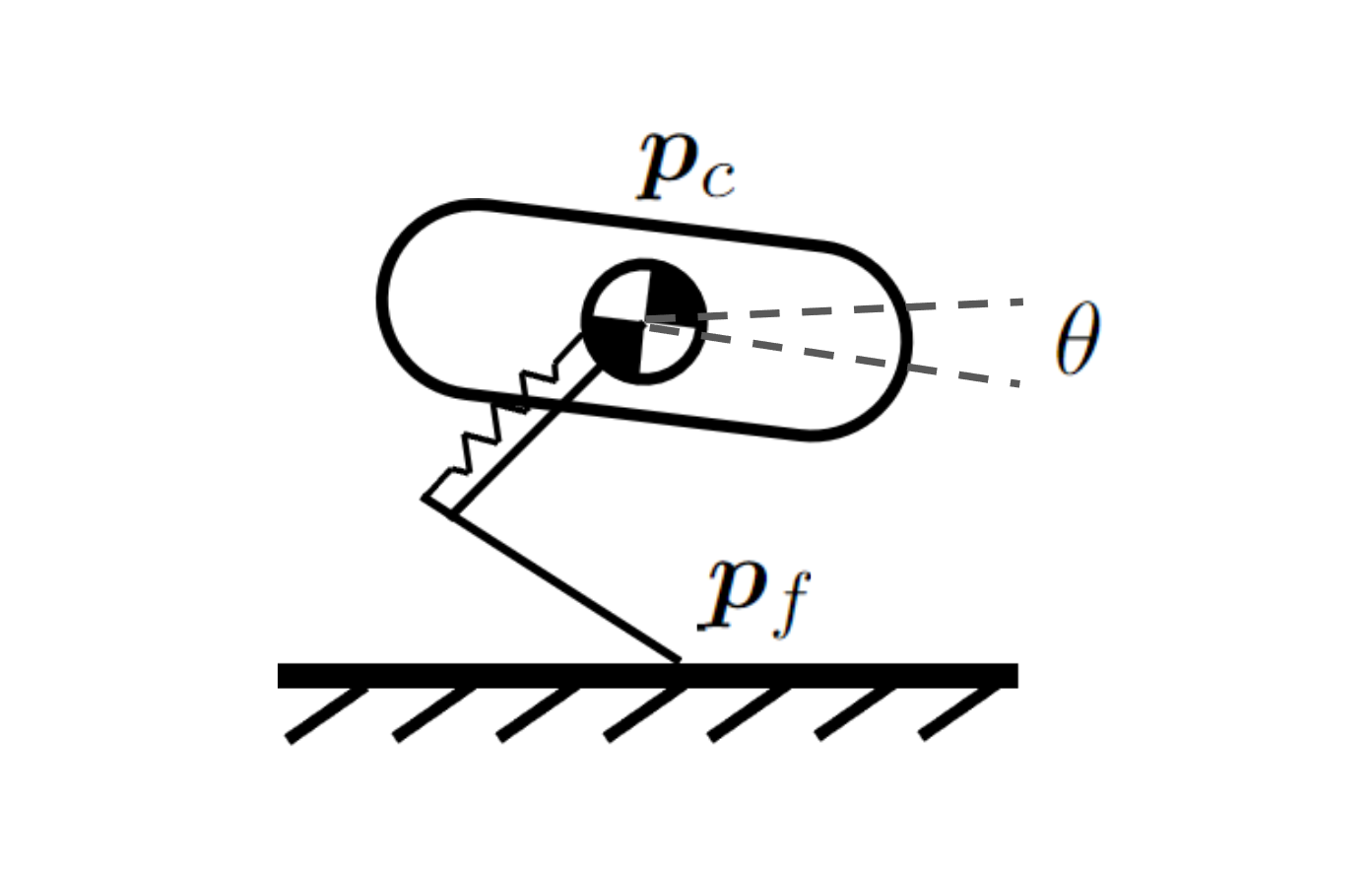
The kinodynamic single rigid body model
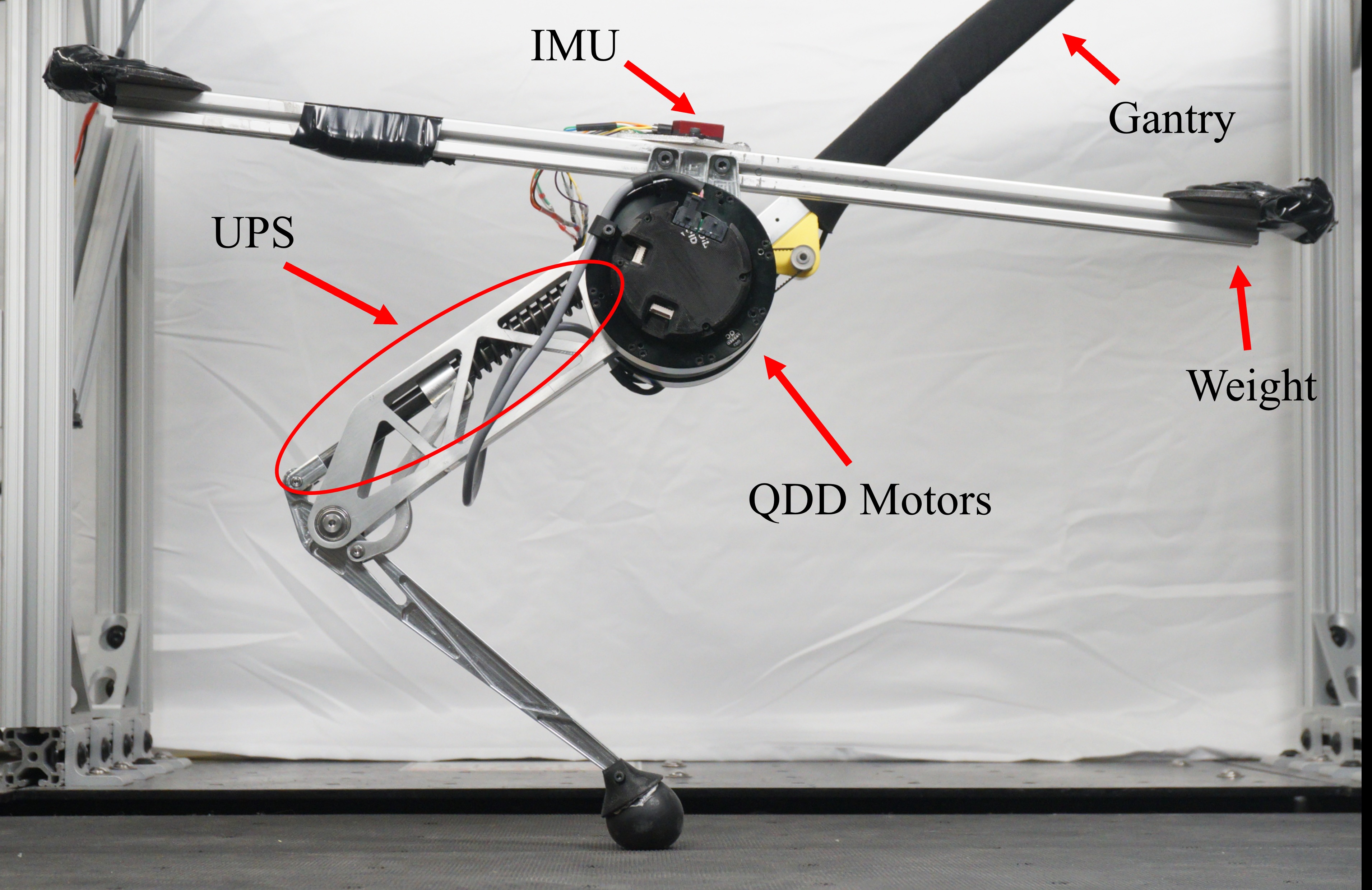
The Monoped with Unidirectional Parallel Spring (MUPS)
Mechanism animation of the UPS
@article{zhuang2026surge,
author = {Yulun Zhuang and Yue Qin and Justin Lu and Zelin Shen and Yichen Wang and Sicheng He and Yanran Ding},
title = {SurGE: Surrogate Gradient-guided Evolution for Co-design of Legged Robots with Parallel Elasticity},
journal = {arXiv preprint arXiv:TODO},
year = {2026},
}